Advanced Process Control (APC) applications rely on models that accurately describe the process behaviour. The modelled response of one or more controlled variables (CVs) to a setpoint change in a manipulated variable (MV) is used to predict these CVs over the prediction horizon. The prediction horizon is usually several hours. Next, optimal setpoint moves are calculated for manipulated variables and a feedback mechanism ensures that the predictions stay in tune with reality.
More accurate predictions enable higher APC performance. Prediction inaccuracies can be caused by unmeasured disturbances, model mismatch, process non-linearities, and many other factors. Fortunately, predictive control and a feedback mechanism together ensure very robust performance. Feedback mechanisms work best when dead times are small, and the need for corrective actions can be recognized early.
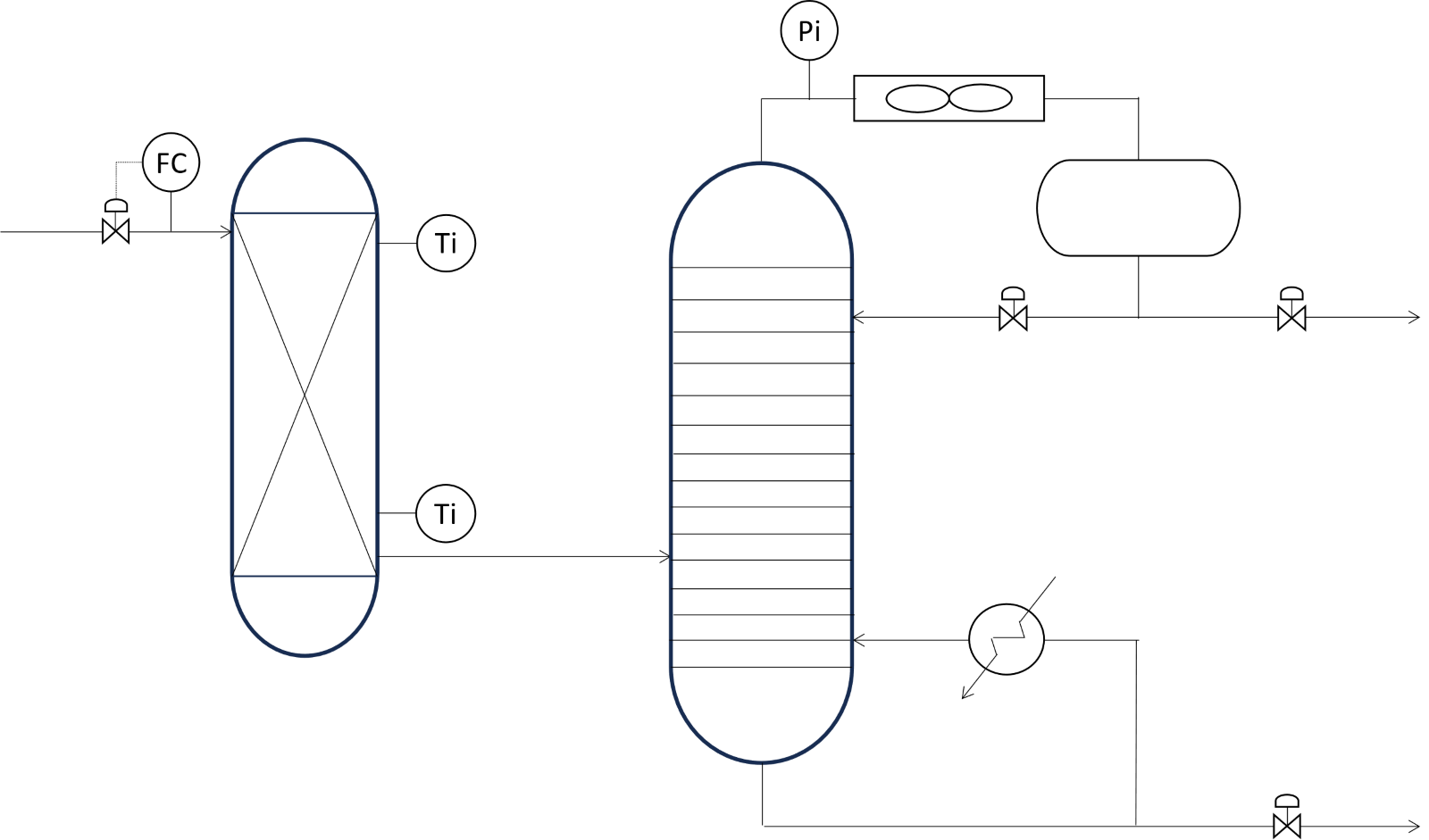
Take, for instance, a reactor in which a feed stream is converted to a desired product, which is purified in a column downstream from the reactor. The column pressure, which is floating, is heavily influenced by the reactor conditions. These are heavily dependent on the feed composition, which is not measured.
An APC application that controls the column pressure will consider the effect of the feed rate on the column pressure. Due to the size of the reactor and the column, it can take a long time before a change in the feed rate results in the column pressure changing and finally settling. This makes accurate control of the pressure a challenge for the APC application.
Using Intermediate Variables to improve CV predictions
The temperature drop over the reactor is an early indication of a changing conversion. It can be used to improve the prediction of the pressure. However, the temperature drop is not an independent variable: it changes whenever the feed rate is changed, and hence it cannot be used as an additional input to the pressure model.
This is where intermediate variables (IVs) come in. Instead of modelling the effect of the feed rate MV on the pressure CV, one models the effect of the feed rate MV on the reactor temperature drop, and the effect of the temperature drop on the pressure CV. The effect of feed rate on pressure is now calculated in two steps, with the reactor temperature drop as the intermediate step.
If the measured temperature drop is different from the value that the model predicts from the feed rate, the predictions for the pressure are updated to reflect the mismatch. This gives updates that are applied sooner than they would be if only the mismatch between the measured pressure and the predicted pressure were used.
In INCA MPC, IVs can be modelled and incorporated in the controller. The APC application will use the IV to improve its predictions of the pressure CV, but it also knows that the feed rate influences the temperature drop IV and, indirectly, the pressure CV.
Note that in this case, the IV is not “controlled” by APC: the APC application does not care about the actual reactor temperature drop. It only uses any prediction errors in that IV as an input to the prediction of the pressure CV. The APC application gets an “early warning” of unexpected pressure deviations due to unexpected changes in the reactor conditions. If there would be a need to control the temperature drop, INCA MPC can use the same variable as a controlled variable and as an intermediate variable.
In a follow up blog post, it will be described how predictions can be improved further by incorporating knowledge about the base layer control structure.
Choose an APC technology that allows you to get maximum performance!
Intermediate variables are a great feature to boost the performance of APC applications. INCA APC provides this capability and is, therefore, key to maximizing the return on investment when implementing APC.
Next blog: intermediate variable functionality in APC modelling tool, INCA Discovery, and how to use the functionality in your online APC application with INCA MPC.
Do you want to know more about INCATools? Read more about MPC here.
