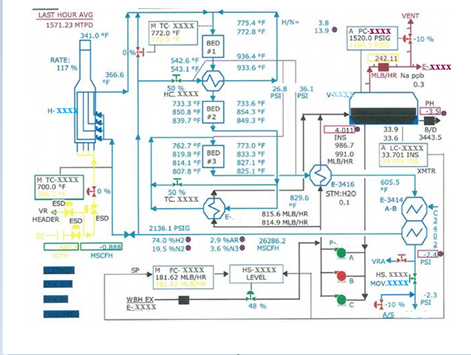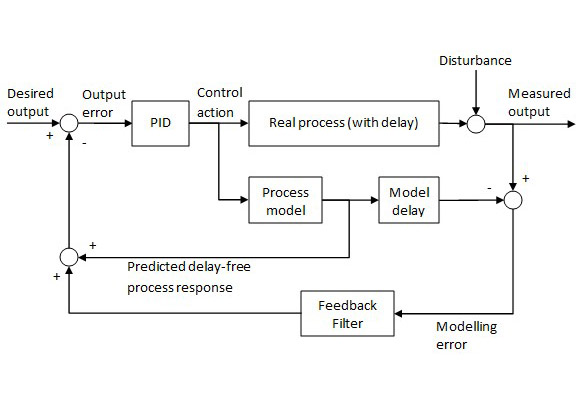
From refineries to petrochemical and chemical industries, the Smith predictor is used to improve the control of processes with a long dead time. The delayed behavior of the process is compensated by using an approximated model in the control structure. It is common for process control engineers to evaluate the need for such control structures and keep them performant. This blog explains the consequences of a long process dead time and what tools to use when tuning your Smith Predictor.