When we work with PID controllers, we always assume that the control valve flow characteristic is linear. PID controllers cannot handle nonlinear responses properly. However, most of the time valves are nonlinear and we have to deal with them when tuning a loop. Process units that change their operating window regularly, have the tendency to affect the performance of the PID controllers. This probably has happened to you before and i know it's really frustrating! But I'll show you a PID tuning example where it's possible to tune a PID controller and have a good performance on a large operating window of a process unit. And that is what I will explain in this blog.
PID tuning Example: the output of the flow keeps dropping
As an example, when you finally tune properly a simple PID loop such as a flow controller at 100% of the load and operators are pleased with your work; the planning department requests to cut the load to 50% and the problems begin! Typically, you are called to check the tuning of the flow controller, which according to operators now seems to be sluggish and cannot keep the flow at its setpoint. After cutting the load, the output of the flow controller dropped significantly to a lower operating range.
You start all over again: put the PID loop in MANUAL, perform a short step test, collect the data, identify the model using the open loop data and tune the controller with INCA PID Tuner. Operators are pleased again.
After a couple of days, planning department calls again and request to increase the load back to 100%. The flow controller starts to oscillate, and operators put it in MANUAL. Operators blame you! What can I do? This seems to be an endless story! How do I tune it?
Don't worry, there is an answer! It's possib
le to tune a PID controller to have a good performance on a large operating window of a process unit.

Identify process data
The first step is to identify from process data the flow characteristics. By plotting in an X-Y chart the valve opening (output of the flow controller) against the flow (PV of the flow controller), you can easily identify the valve’s flow characteristics as can be seen in the figure below.
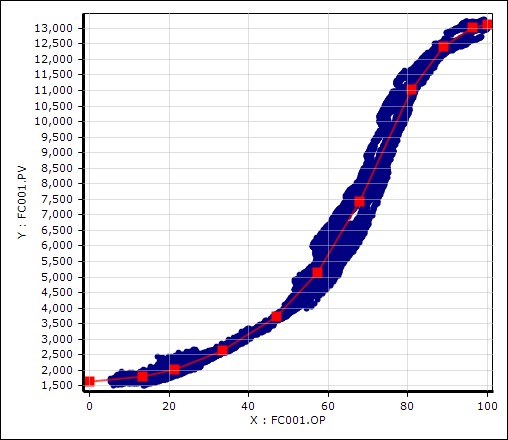
I was able to find the flow characteristics and by normalizing the curve above, I obtained the table needed for the characterization. There are a couple of tips important while during this procedure:
- Always normalize the identified curve
- Always the characterization should have a 0% point and a full scale 100% point
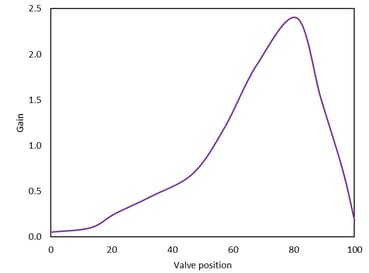
If we plot the valve position against the slope from the previous table, it can easily be observed how the gain is changed when the valve changes its opening:

Create a characterization block
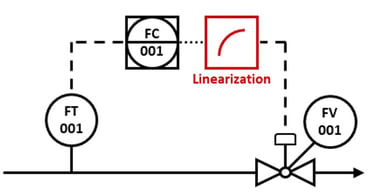
Until now, I was able to explain what had happened, but the problem is still unresolved. The correct solution to this problem would be to replace the valve with one that has a linear flow characteristic and then retune the PID loop. However, this could only be possible during a plant shutdown. In the meantime, what I have done is to implement this valve’s flow characterization in the DCS, and to do so I have created a characterization block between my PID controller and the signal that finally goes into the field to the valve.
Inside the linearization block, the table identified should be added, but it should be transposed (grey curve in the figure below). This is really important to keep in mind!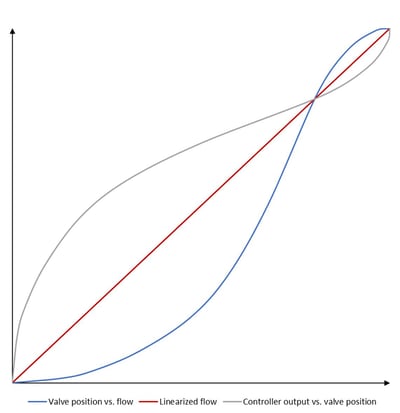
Finally, a good performance of the PID loop
I retuned the PID controller with the characterization installed. After this, the PID loop has a good performance throughout the valve operating range. One final remark: remember to show the actual valve position in the DCS display, it is important if some day the instrumentation engineer goes into the field to re-calibrate the positioner again.
Do you want to learn more about nonlinear PID control? Read the ebook: 'The guide to PID tuning'.

Do you like to know what INCATools PID tuning software can offer you?
Request your demo here.
