PID control is widely used for process control across various industries. However, PID control performs well if the process behaviour is almost linear, which is not the case most of the time. Non-linearities are quite common in practice, although they are often not properly identified or considered for the design of the control system.
Non-linearities can come from different sources, such as:
- Process behaviour: Some industrial processes are inherently non-linear, e.g., pH control, heating/cooling systems.
- Final control elements: Depending on the type of control valve and its installation, the installed flow characteristic can vary from linear to non-linear.
In this blog, we will discuss how to detect process non-linearities and some practical solutions to overcome them. If you want to know how to tune a PID controller with a non-linear response on the valve, please read our blog on the topic here.
Process non-linearities affect PID control loop performance
The PID algorithm was developed to deal with linear process responses, and when a process exhibits non-linear behaviour, the performance of a PID control loop could be sub-optimal.
The process operating range can move to a new operating point where the process exhibits non-linear behaviour. Thus a PID control loop might work well in one operating range, but its performance could degrade if the process moves to another operating point. The result might be a PID loop whose closed-loop response is too sluggish or aggressive. If the PID controller has been tuned in the low gain range and the process operating range moves to the high gain range, then some instability may result, depending on the robustness of the PID control loop.
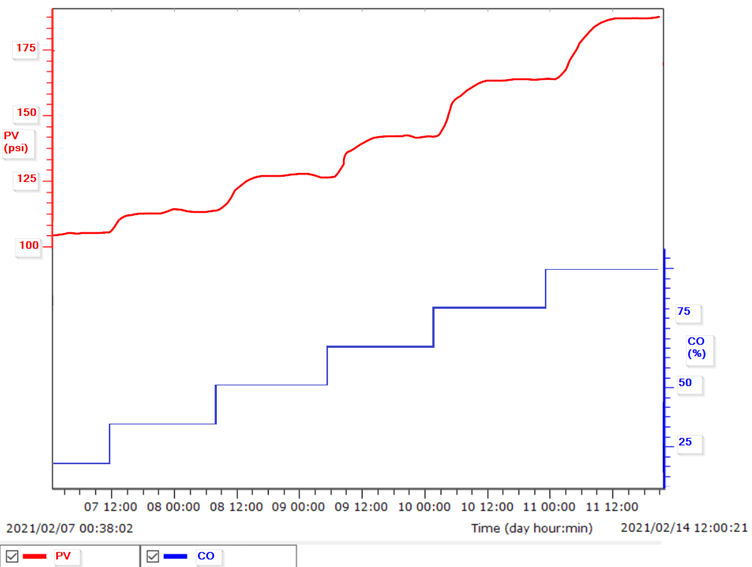
The following figure shows a typical example of a non-linear response. For the same OP change, the PV change is not the same, i.e., the process gain changes at different operating positions of the valve.
How to detect process non-linearities and the practical solutions to overcome them
The most important step to detect process non-linearities is to collect some good quality data while performing valve output changes at different operating points. If possible, the changes in valve output should cover the entire operating range.
One could apply the following methodology for data collection:
- Put the PID control loop on manual and wait for the process to stabilize.
- Perform a step change in the controller output. The step size will vary depending on the process.
- Wait for the process to stabilize.
- Perform another step change in the controller output with the idea of covering the entire operating range.
- Wait for the process to stabilize.
- Repeat steps 4 and 5.
Once you have gathered all the process data, you can implement the following practical solutions:
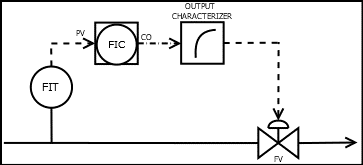
- Output linearization: Implementation of a characterizer block is required as shown below:
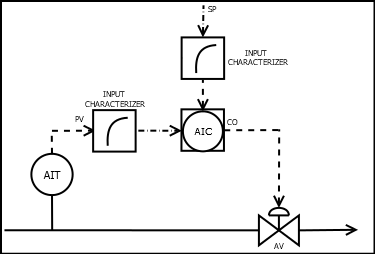
- Input linearization: Commonly applied for pH control as shown below:
Tackling process non-linearities brings benefits to your plant performance
Typical benefits include:
- Improve PID control loop performance.
- Obtain stable operation across the entire operating range.
- Reduce the risk of control instability.
- Reduce process variability.
If you want IPCOS to advise you on PID tuning, process knowledge and the right tools to help you accomplish optimized plant performance:

